桥梁维养智能控制系统
紧跟政策导向,加大研发力度,提高产品的智能化水平
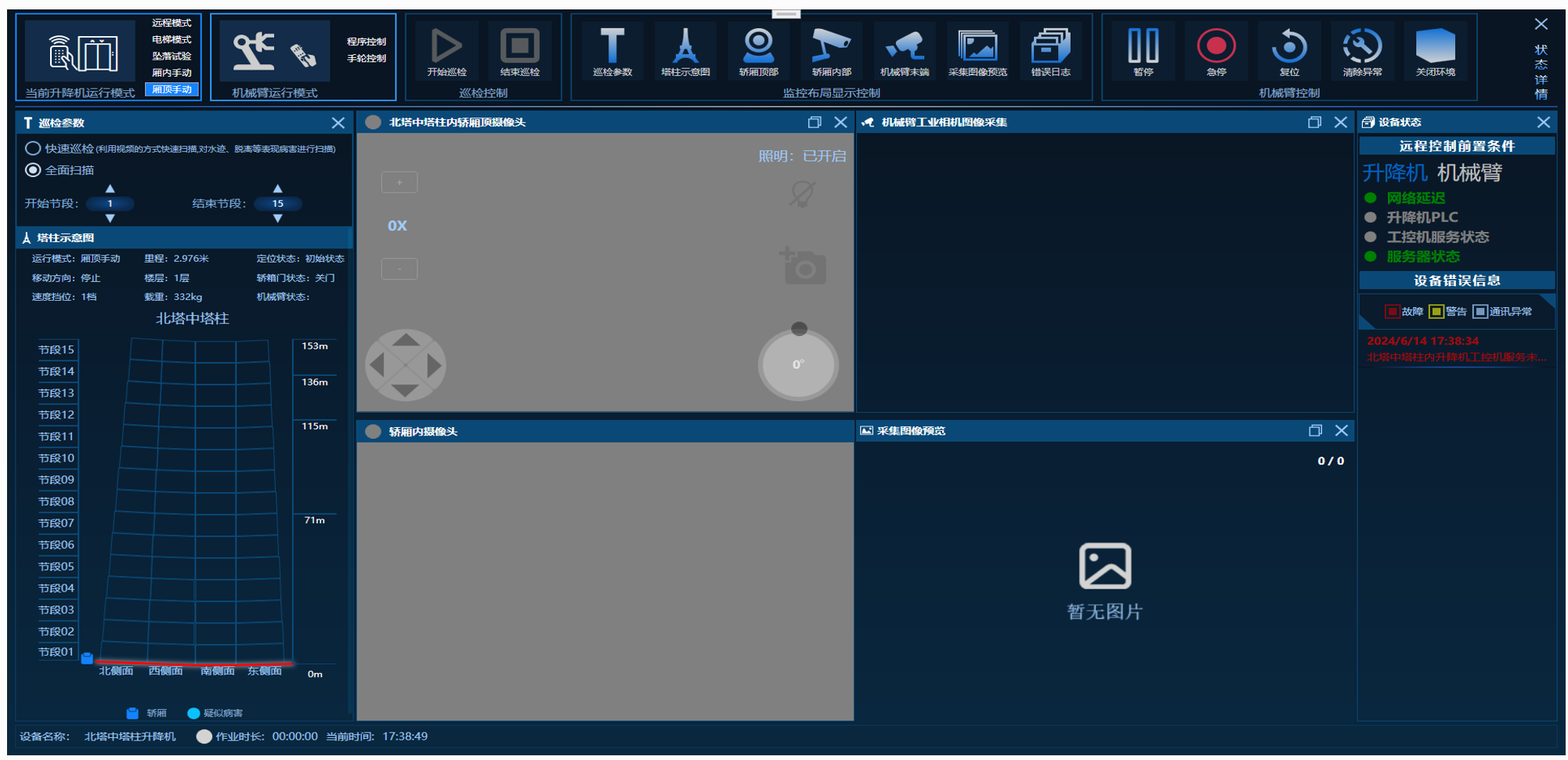
桥梁维养智能巡检系统


")
项目简介
面向跨海/跨江大桥塔柱密闭空间设计的"检测-分析-修复"一体化机器人系统,深度融合激光雷达导航、多传感器融合定位与自主路径规划技术,实现塔柱内壁"毫米级病害扫描+全自动闭环作业",彻底解决人工攀爬效率低、高空修复风险大、恶劣天气作业难等核心痛点,推动桥梁养护从"被动响应"向"预测性维护"升级。
") 核心功能与创新突破
核心功能与创新突破
1. 全自主智能巡检
三维空间建模:激光雷达+毫米波雷达实时构建塔柱内部高精度点云地图(分辨率±2mm),自动划分扫描高度区间
动态路径规划:
▸ 基于BIM模型与实时点云数据,自主生成逐层扫描路径
▸ 机械臂七轴联动算法自动计算最佳检测姿态,末端定位精度达0.1mm
多模态数据采集:
▸ 高精度定焦工业相机(50μm像素解析力)拍摄裂缝/锈蚀/渗漏等病害
2. 人机协同作业模式
一键接管机制:自动巡检中可随时暂停任务,机械臂能自主收回至安全姿态,释放升降机载人功能
智能避障系统:激光雷达实时监测移动障碍物(如临时支架/线缆),动态调整机械臂运动轨迹
3. 病害精准量化管理
AI智能诊断引擎:
▸ 支持12类表观病害分类识别(裂缝宽度/长度测量误差<0.05mm)
数字孪生档案:
▸ 自动生成带三维坐标的《塔柱病害分布图》
▸ 输出周期性《结构健康趋势分析报告》(含安全评级与维护建议)
4. *检修一体拓展能力(研发中)
模块化末端工具库:
▸ 检测模式:搭载工业相机/探伤仪进行病害复查
▸ 修复模式:快换打磨头(除锈精度0.2mm)、高压注浆嘴(裂纹修复深度≥15cm)、智能喷漆臂(涂层均匀度>98%)
闭环养护管理:
▸ 修复后自动启动复检程序,验证施工质量
▸ 定期生成《维护效果对比分析报表》,量化养护成效

演进蓝图
未来将上线云端远程修复控制模块,支持专家通过数字孪生模型指导机械臂完成高难度修复作业,真正实现"无人化养护基地"建设目标。
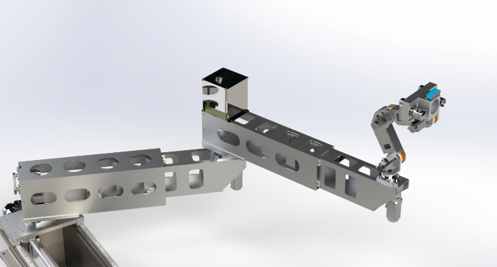
智能巡检机器人
功能
l 巡检机器人具备避障功能
l 市电掉电,巡检机器人自动立即收回原点
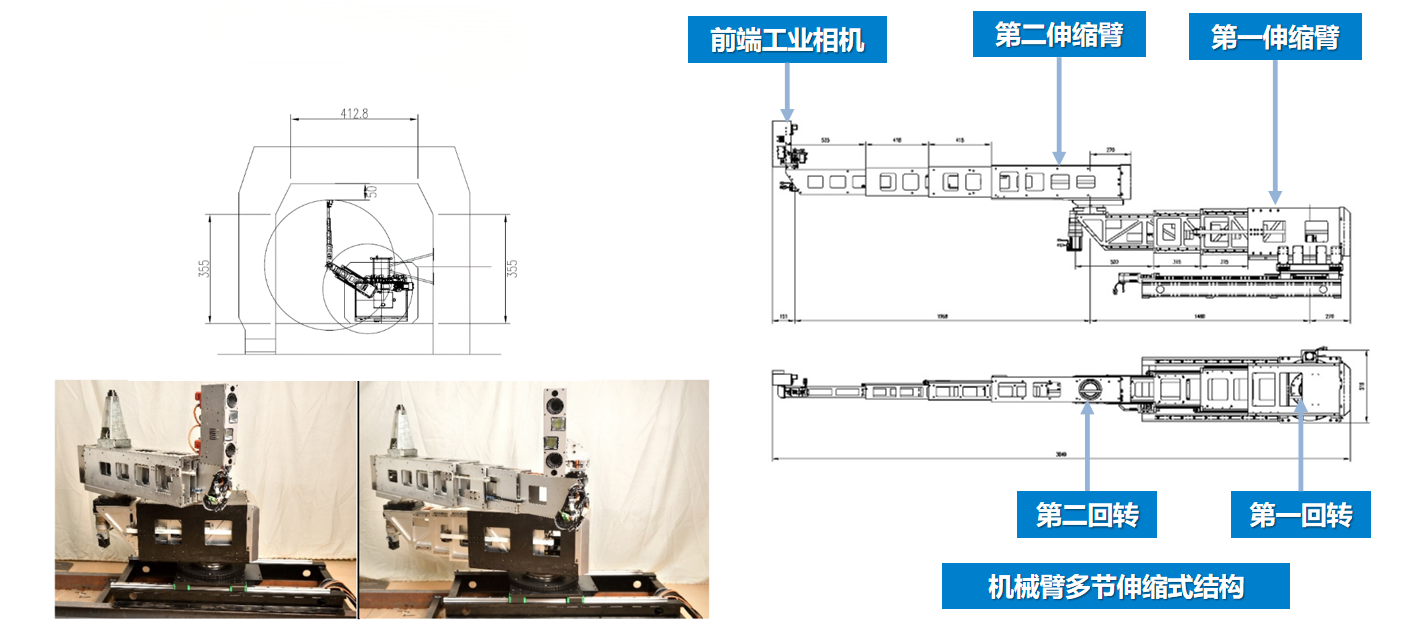
l 采用重叠旋转多节伸缩式结构,收回时呈重叠状态存放在轿厢顶有限的空间内,避开升降机运行过程中各种障碍。
l 采用两个伸缩、旋转方式绕过升降机的导轨架,实现更大范围的检测。
l 采用末端俯仰功能,减少病害巡检时间(单塔扫描小于12h)
")
技术参数
序号 | 项目 | 技术指标 |
1 | 伸缩长度 | 3200mm |
2 | 旋转角度 | 360° |
3 | 负载 | 末端负载10kg,形变小于8mm |
4 | 定位精度 | 定位精度满足:±5mm |
5 | 末端俯仰 | 末端俯仰角度范围满足:±10° |
末端旋转精度满足:±0.5° |